MagicBot Z1
MagicBot Z1:Fearless Momentum








| Specifications | Z1 | Z1 Development Version | |
|---|---|---|---|
| Mechanical Parameters | Height, Width, Thickness (Standing) | 1369*422*200mm | 1369*422*200mm |
| Height, Width, Thickness (Folded) | 730*422*395mm | 730*422*395mm | |
| Weight with Battery | Approximately 40kg | Approximately 40kg+ | |
| Total Degrees of Freedom (Number of Joints) | 24 | 24 - 50 | |
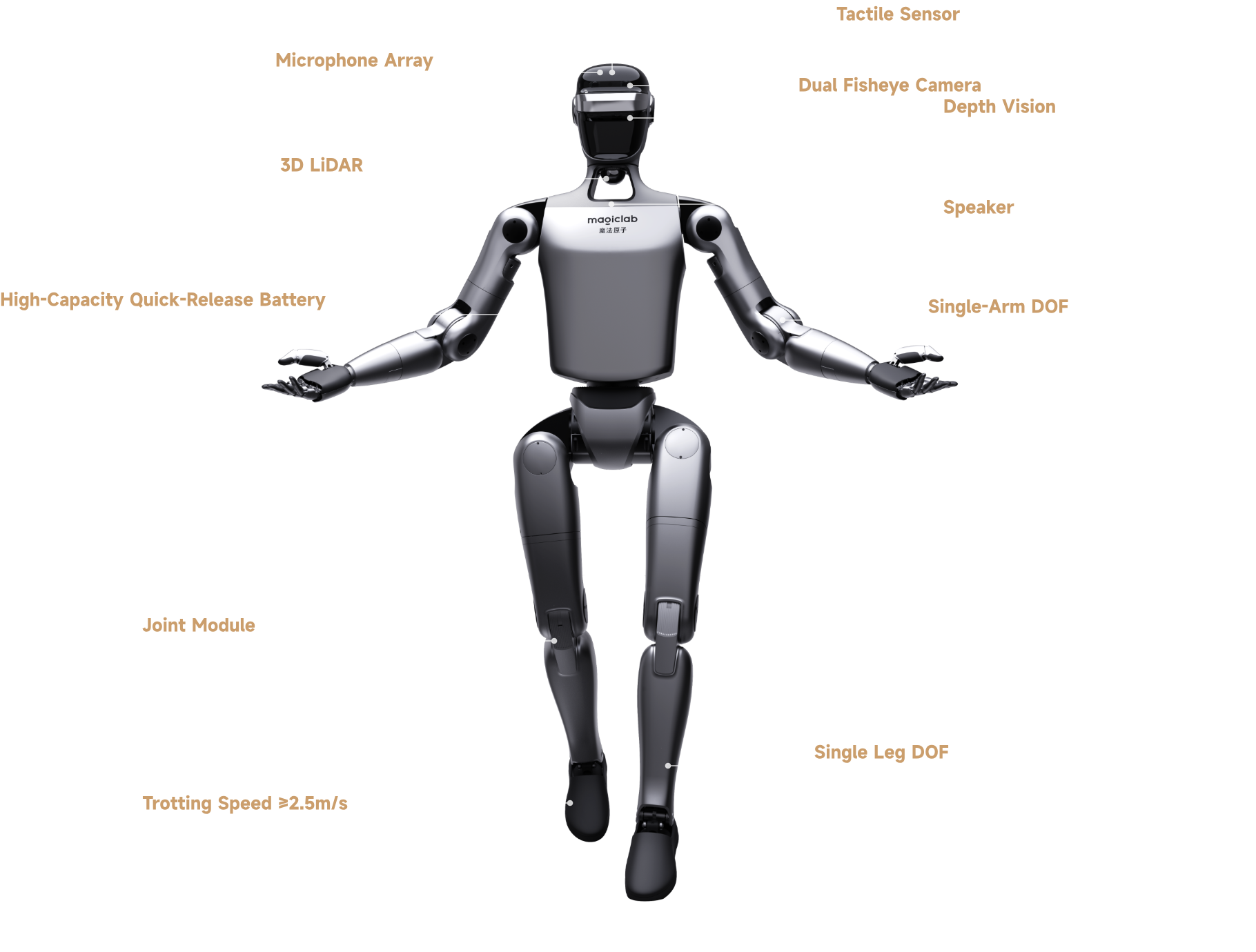
| Single Leg Degree of Freedom | 6 | 6 | |
| Head Degree of Freedom | 1 | 1 | |
| Waist Degree of Freedom | 1 | 1 | |
| Single Arm Degrees of Freedom | 5 | 5 + (2 additional wrist degrees of freedom can be optionally selected) | |
| Degrees of Freedom of Dexterous Hand | / | Optional 11-DOF tactile dexterous hand | |
| Joint Output Bearing | Industrial-grade high-rigidity roller bearing (capable of withstanding 8.7KN impact force) | Industrial-grade high-rigidity roller bearing (capable of withstanding 8.7KN impact force) | |
| Joint Motor | Low-inertia, high-speed, high-overload permanent magnet synchronous motor (control frequency 25kHz, high burst power, better heat dissipation) | Low-inertia, high-speed, high-overload permanent magnet synchronous motor (control frequency 25kHz, high burst power, better heat dissipation) | |
| Maximum Knee Torque* | 100N.m | 130N.m | |
| Maximum Arm Load* | 2kg | 3kg | |
| Shank + Thigh Length | 0.6m | 0.6m | |
| Arm Span | Approximately 0.5m | Approximately 0.5m | |
| Range of Motion of the Head Z-Axis Joint | ±40° | ±40° | |
| Range of Motion of the Lumbar Z-Axis Joint | ±160° | ±160° | |
| Range of Motion of the Knee Joint | 0~152° | 0~152° | |
| Range of Motion of Hip Joint | P±160°、R-30~+110°、Y±160° | P±160°、R-30~+110°、Y±160° | |
| Electrical Characteristics | Joint Encoder | Dual Encoder | Dual Encoder |
| Heat Dissipation System | Intelligent Air-cooled Heat Dissipation | Intelligent Air-cooled Heat Dissipation | |
| Power Supply Mode | 15-cell battery | 15-cell battery | |
| Basic Computing Power | 8-core high-performance CPU | 8-core high-performance CPU | |
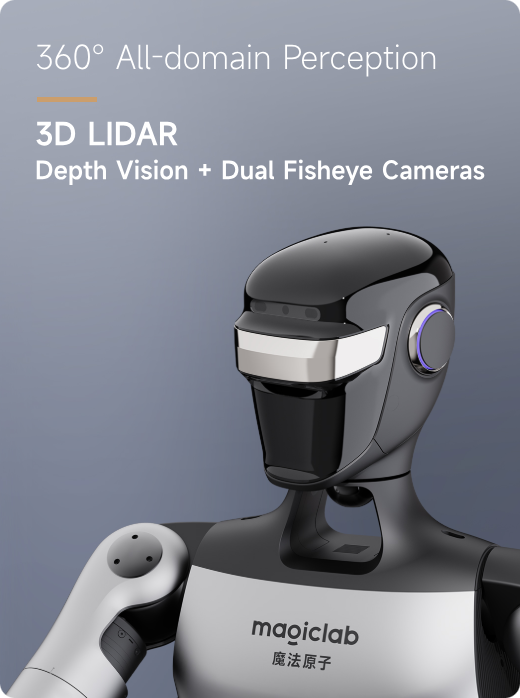
| Perception Sensor | 3D LiDAR + Depth Camera + Binocular Fisheye Camera + Head Tactile Sensor | 3D LiDAR + Depth Camera + Binocular Fisheye Camera + Head Tactile Sensor | |
| WiFi6, Bluetooth 5.2 | has | has | |
| Microphone Array | has | has | |
| 5W Speaker | has | has | |
| Supporting | High Computing Power Module | None | Optional |
| Smart Battery (Quick Release) | 10000mAh | 10000mAh | |
| Charger | 62V 5A | 62V 5A | |
| Handheld Remote Control | has | has | |
| Other | Battery Life** | Approximately 2h | Approximately 2h |
| OTA Upgrade | Support | Support | |
| Secondary Development | None | has |