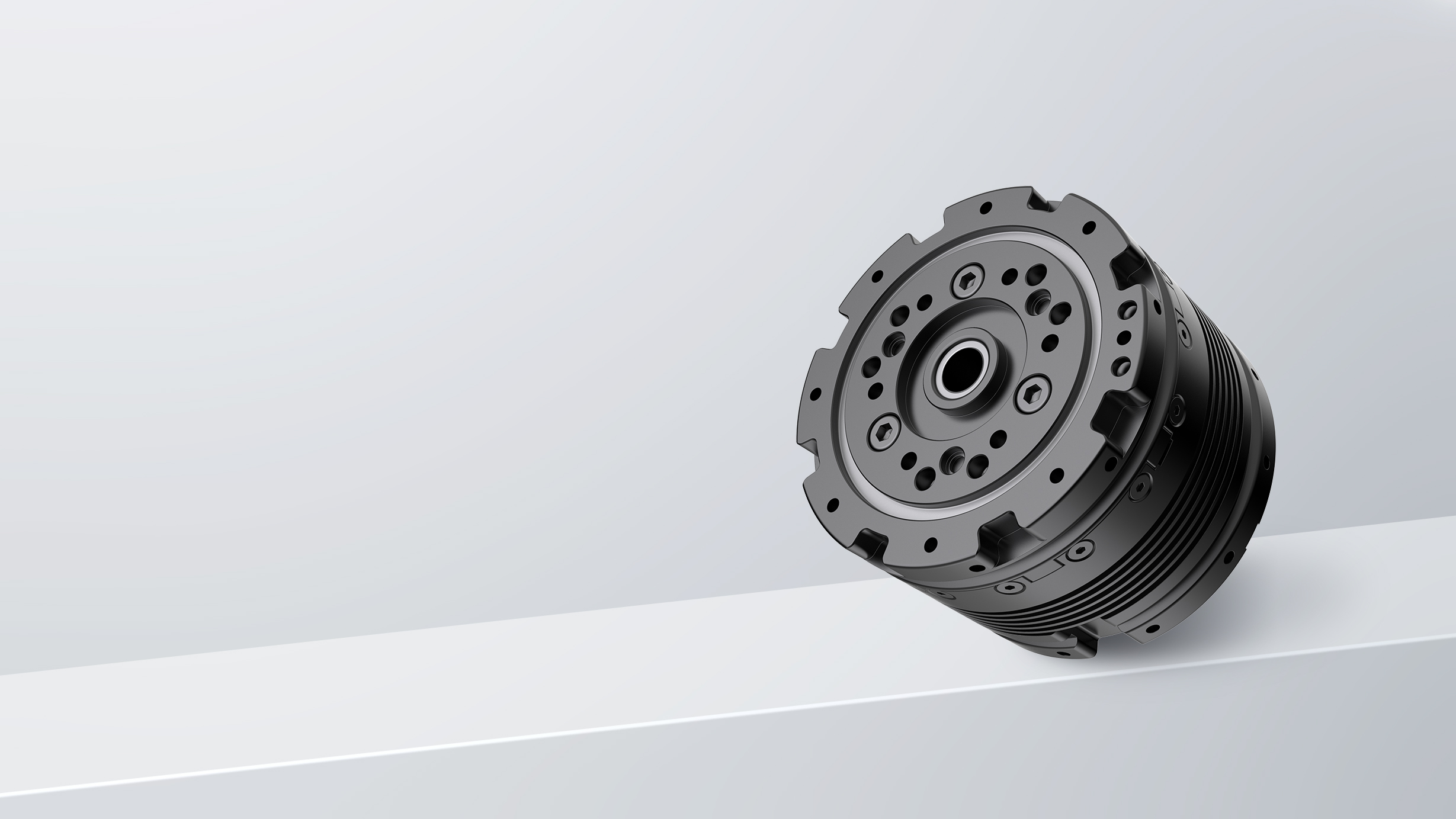
P90N20
- Lightweight design with compact radial space
- Equipped with industrial-grade cross roller bearings for high precision and rigidity
- Excellent thermal structure to control temperature rise
- Supports a maximum hollow shaft diameter of 10.6mm, meeting diverse wiring needs
High overload capability
High power density
High performance
Large hollow wiring passage
Born for powerful engine, effortlessly tackling complex wiring
Tailored for multi-size humanoid robots and medium-to-large quadruped robots, delivering robust output and reliable performance.
The ultra-large hollow shaft design easily accommodates intricate wiring harnesses, optimizing overall layout while providing solid support for system integration and stable operation.
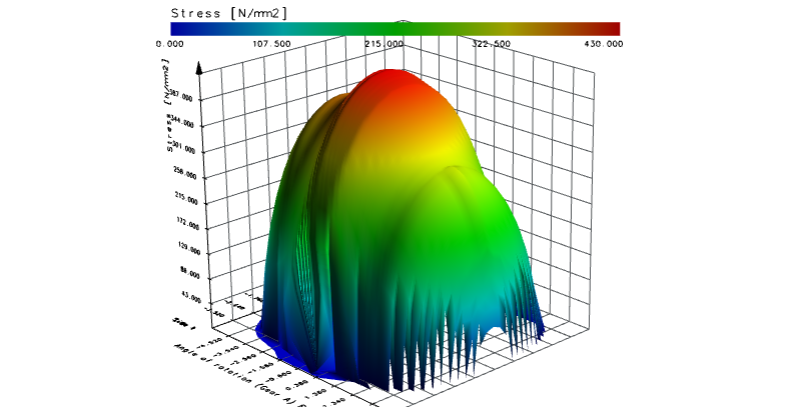
Optimized Gear Design: Balancing Stability and Strength
Based on advanced gear modification theory, the high-precision, low-transmission-error gear system significantly reduces operational noise.
The high-strength structural design, combined with optimal stress distribution, ensures more reliable and quieter power transmission.
Providing robust support for stable robot operation under heavy loads.
Optimize the magnetic flux density design and select the optimal pole-slot combinationReduce harmonic distribution coefficients and eliminate tooth harmonics
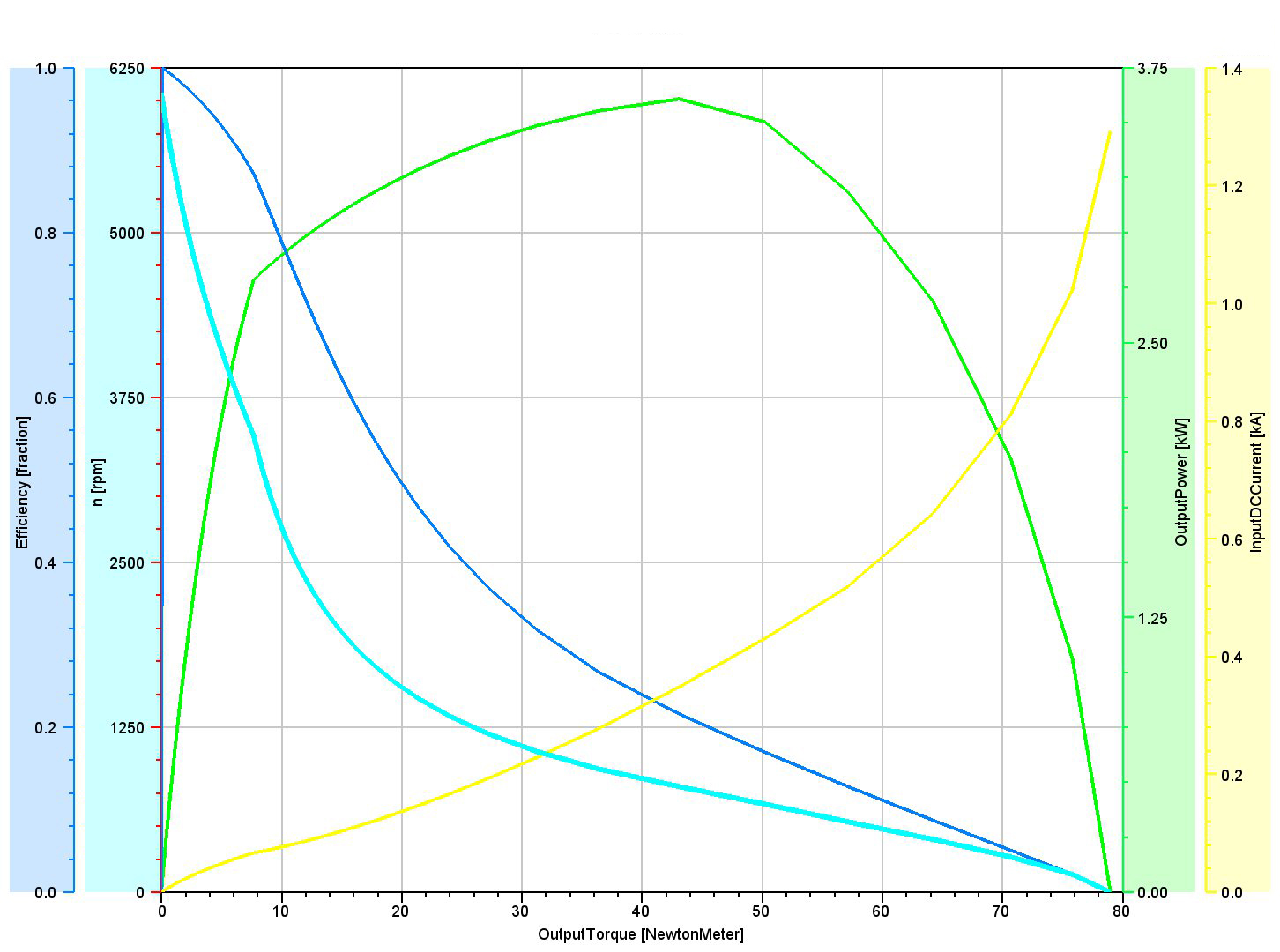
Motor Control Characteristic Curve
产品参数
Gearbox Type
Planetary Gear
Maximum Speed
300rpm(24V power supply)
Module Weight
1100g
Rated Torque
35N.m
Dimensions
φ92*63.4
Peak Torque
130N.m
Communication Interface
CAN/EtherCAT
Peak Current
67.2A
Recommended Operating Environment
-5℃~40℃
Encoder Configuration
Dual Encoder
Operating Voltage
48V-54V
Motor Encoder Resolution
18Bit
Control Frequency
25,000Hz
Motor Feedback
Torque, Angle, Angular Velocity, Temperature
Control Modes or Commands
Torque, Angle, Angular Velocity, Stiffness, Damping

45° Angle
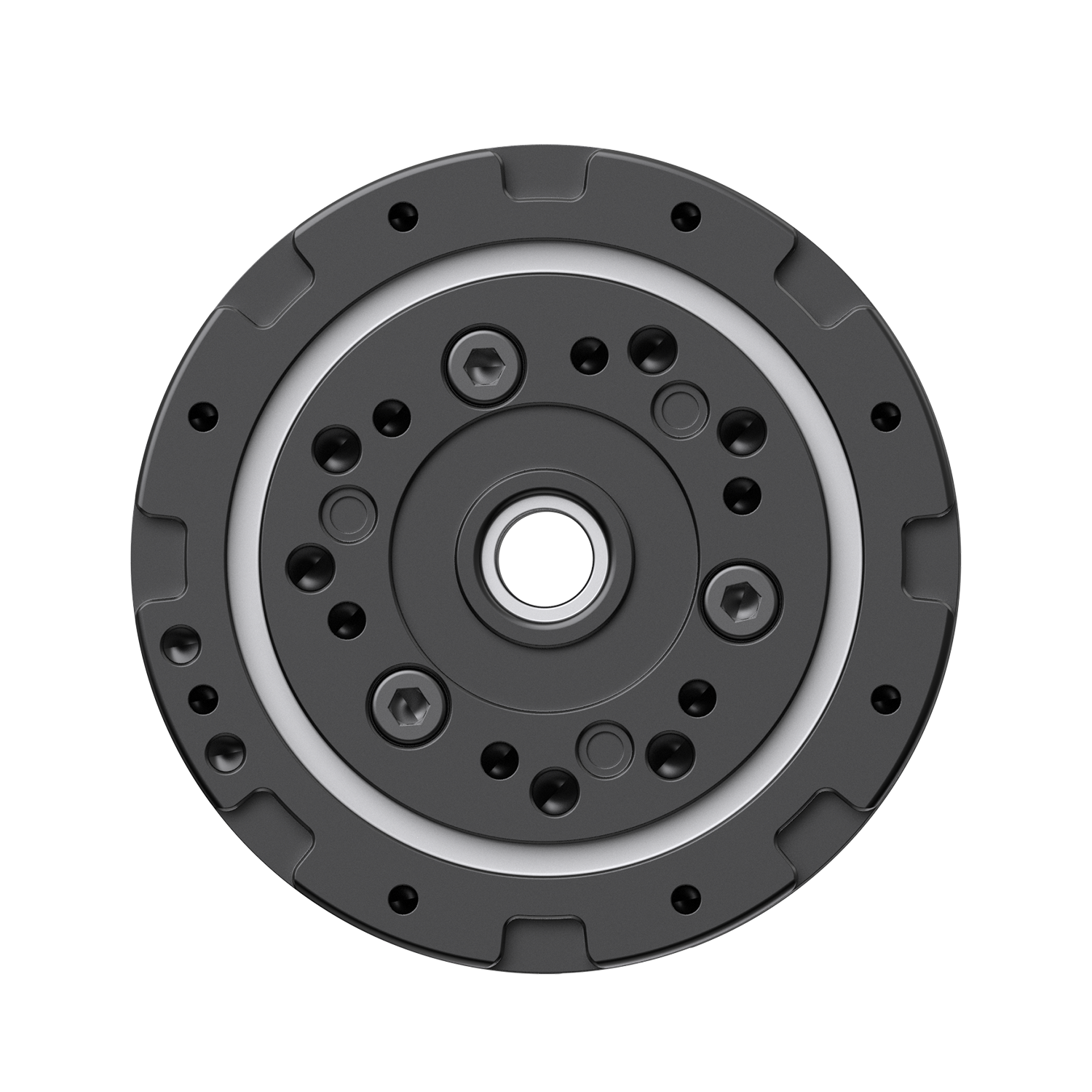
Front View
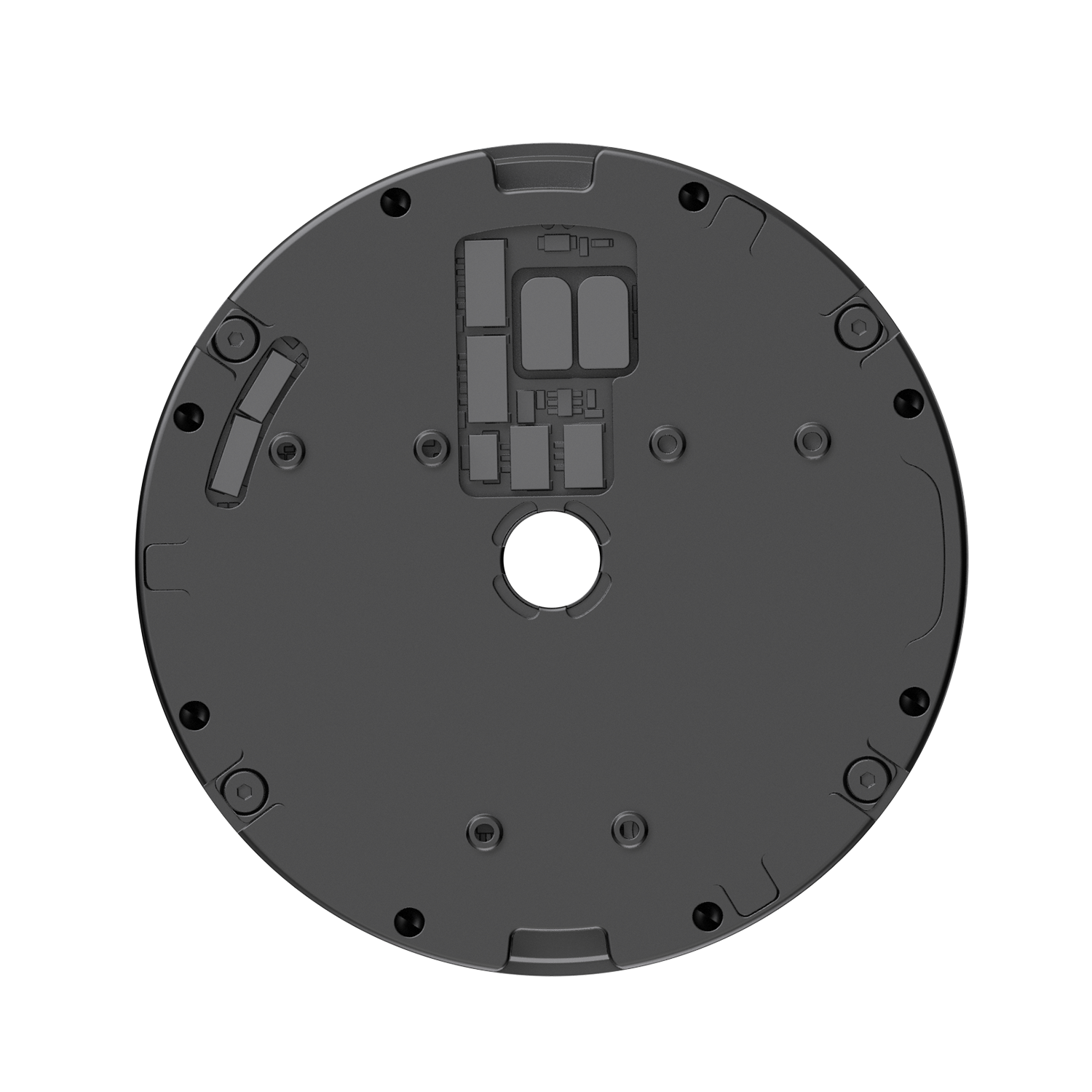
Rear View
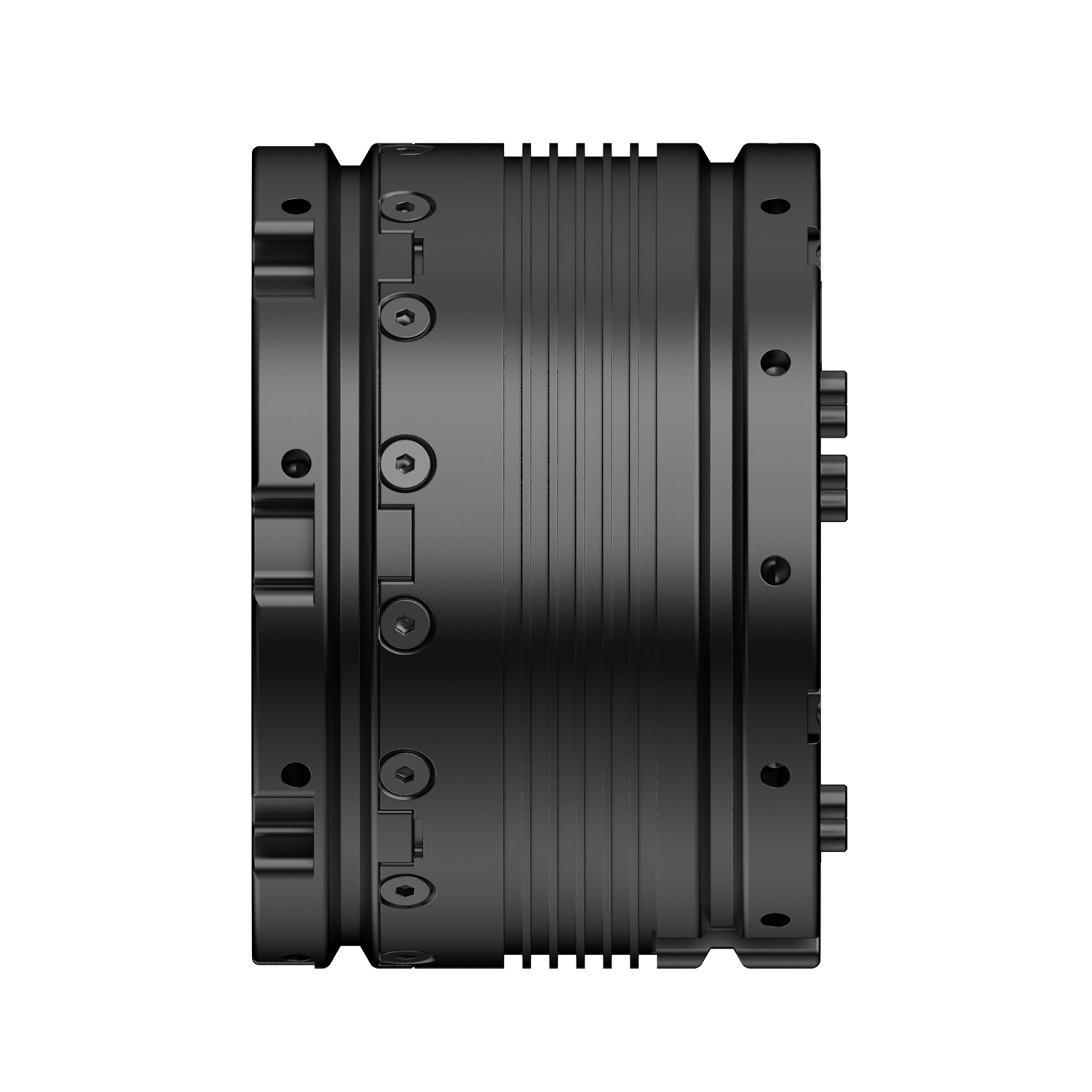
Side View

Top View