P110
- High reliability, high torque density, and high power density
- Industrial-grade cross roller bearings for superior load capacity and rigidity
- Compact axial/radial dimensions for easy installation
- Cost-effective with long-term stable operation
Ultra-high drive torque
Exceptional power density
Dual-encoder system
Multiple high-speed communication protocols
Scientific therma protection strategy

Full-Scale Power Core: The Ultimate Drive Solution
Created exclusively for full-size humanoid robots and industrial-grade large quadruped robots, P110 delivers exceptional torque output and exceptional stability – particularly optimized for high-load joints such as leg actuators.
Built to conquer complex terrains and demanding tasks, P110 works as a continuous and reliable driver to push robots achieve high performance.

Hardcore Gearing, Unmatched Load Capacity
Premium alloy gears with advanced hardening process deliver exceptional wear resistance and high load capacity.
Guarantees rock-solid reliability during prolonged high-torque operation, providing continuous drive power for robotic joints in complex environments.

High-Rigidity and Low-Noise design: The Durable and Stable Joint Solution
The joint module incorporates a high-precision bearing support structure, delivering core advantages of high rigidity, extended service life, and ultra-low noise operation.
The whole-system operational stability and service life have been significantly enhanced, delivering rock-solid reliability for mission-critical tasks.
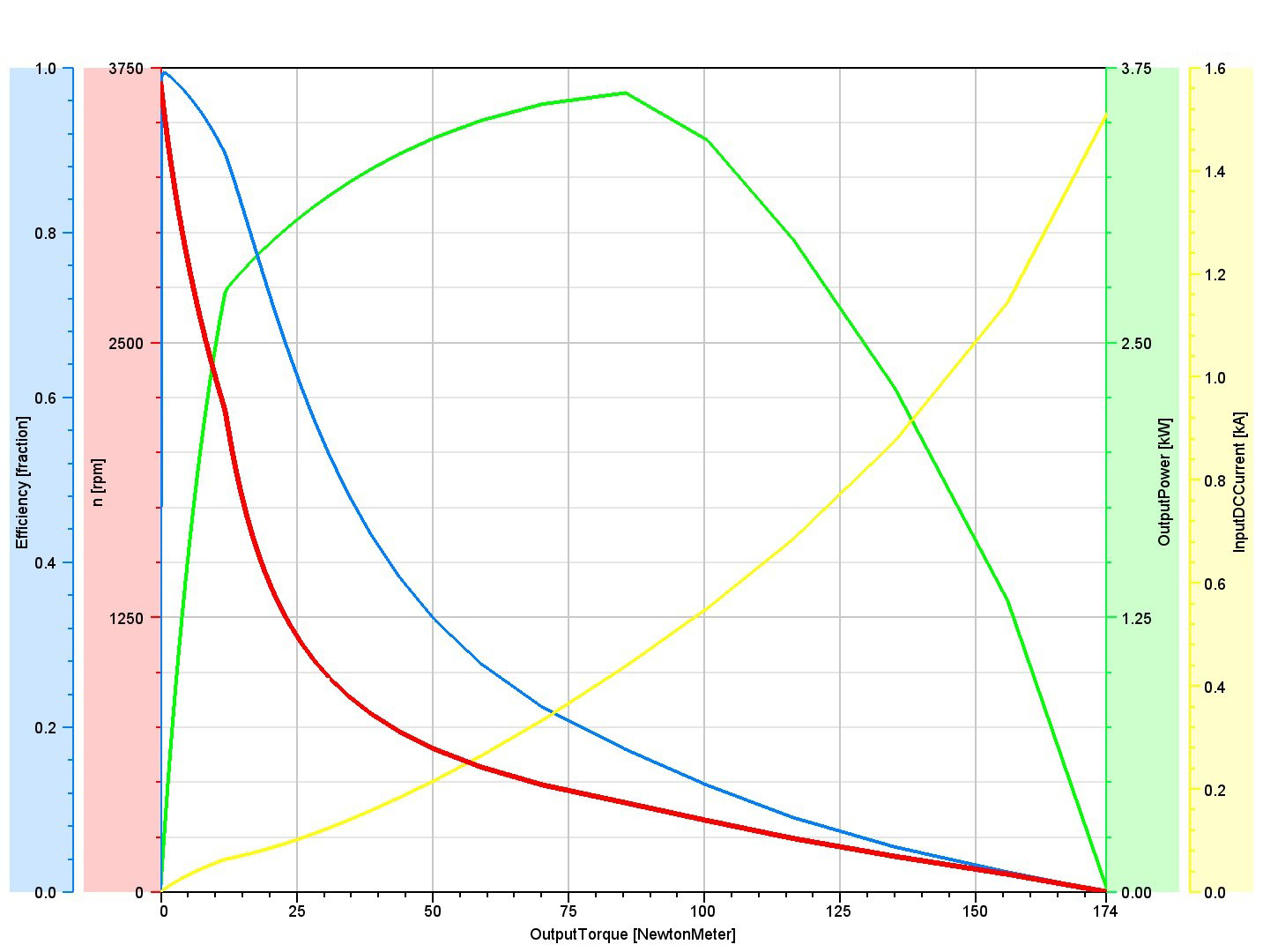
Motor Control Characteristic Curve
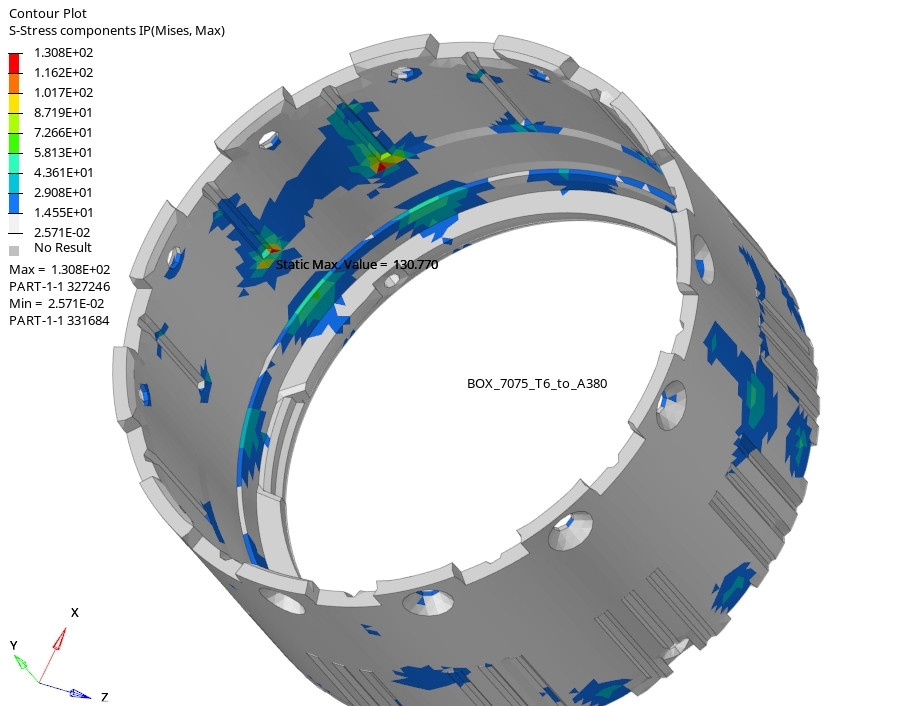
Ensures high periformance and long lifespan through FEA (Finite Element Analysis) technologyAchieves lightweight design via topology optimization
产品参数
Gearbox Type
Planetary Gear
Maximum Speed
20rpm(24V power supply)
Module Weight
1900g
Rated Torque
90N.m
Dimensions
φ112*71.5
Peak Torque
360N.m
Communication Interface
CAN/EtherCAT
Peak Current
137A
Recommended Operating Environment
-5℃~40℃
Encoder Configuration
Dual Encoder
Operating Voltage
48V-54V
Motor Encoder Resolution
15Bit
Control Frequency
25,000Hz
Motor Feedback
Torque, Angle, Angular Velocity, Temperature
Control Modes or Commands
Torque, Angle, Angular Velocity, Stiffness, Damping
45° Angle
Front View
Rear View
Side View

Top View